
모터의 원리는 로렌츠 힘(Lorentz Force)에 의해 설명되는데, 자기장속에서 전류가 흐르면 힘이 발생한다는 것으로 이 힘이 모터를 돌리게 됩니다.
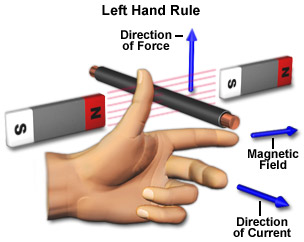 |
| 로렌츠의 힘을 설명하는 플라밍의 왼손 법칙 |
모터는 작동 방식에 따라 여러가지로 분류될 수 있는데, 우리가 흔히 사용하는 모터는 DC 모터입니다.
DC 모터는 다음과 같은 특성이 있습니다.
- DC 모터에 흐르는 전류의 세기에 따라 회전 속도가 달라진다.
- DC 모터에 흐르는 전류의 방향에 따라 회전 방향이 달라진다.
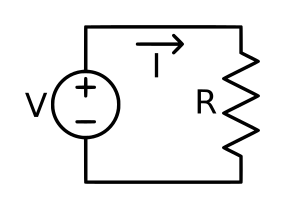
DC 모터를 제어하는 가장 간단한 방법은 전류가 흐르도록 회로를 구성하는 것입니다.
 |
| DC 모터를 배터리에 연결하면 바로 작동합니다. |
DC 모터의 회전 속도를 조절하기 위해서는 전류를 조절해야 하는데, 옴의 법칙(Ohm's Law)에 따라 전압 혹은 저항을 통해 전류를 조절하여 DC 모터의 회전 속도를 제어할 수 있습니다.
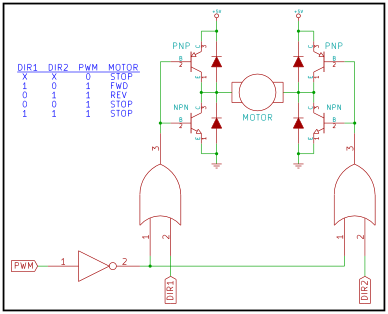
문제는 DC 모터의 속도와 회전 방향을 아두이노 보드에서 제어하려면 좀 복잡한 회로가 필요합니다. DC 모터를 제어하는 대표적인 회로는 H-bridge 회로입니다.

스위치 역할을 하는 트랜지스터 4개를 이용해서 구현하는 회로로써 모양이 H와 같다고 하여 H-bridge 회로라 부릅니다.
이 회로를 이용하면 DC 모터의 회전 속도와 방향을 아두이노 보드로 제어할 수 있습니다.
H-bridge 회로를 구현하려면 좀 복잡하므로 Motor Driver IC를 많이 사용합니다.
 |
| 대표적인 Motor Driver IC인 L293 |
GenericMotor는 DC 모터를 제어하기 위한 H-bridge 회로를 유니티에서 다룰 수 있게 해주는 ArdunityController입니다.

H-bridge 회로는 사용 방법에 따라 3가지 유형으로 나눌 수 있고, 각 유형에 따라 GenericMotor의 설정 방법이 달라지니 자신이 사용하는 방식이 어떤 것인지 잘 알고 있어야 합니다.
1. One PWM & One Direction
1개의 방향 제어용 Pin과 1개의 속도 제어용 Pin을 이용해서 H-bridge회로를 제어하는 유형입니다.
 |
| One PWM & One Direction으로 제어되는 H-bridge |
아두이노 모터 쉴드가 대표적으로 이 방법을 사용합니다.
 |
| 아두이노 모터 쉴드 |

이 경우 GenericMotor의 설정은 다음과 같습니다.

- id: ArdunityApp이 ArdunityController를 구별하기 위한 식별자
- controlType: H-bridge 제어 유형 선택
- dir Pin: 방향 제어로 사용되는 Pin 번호
- pwm Pin: 속도 제어로 사용되는 PWM Pin 번호
2. Two PWM
2개의 PWM 핀을 이용해서 H-bridge 회로를 제어하는 유형입니다.
 |
| 2개의 PWM신호로 제어되는 H-bridge 회로 |
L298이라는 Motor Driver IC가 이 방식을 사용합니다.
 |
| L298 Motor Driver IC |

이 경우 GenericMotor의 설정은 다음과 같습니다.

- F pwm Pin: 정회전 속도 제어용 PWM 핀 번호
- B pwm Pin: 역회전 속도 제어용 PWM 핀 번호
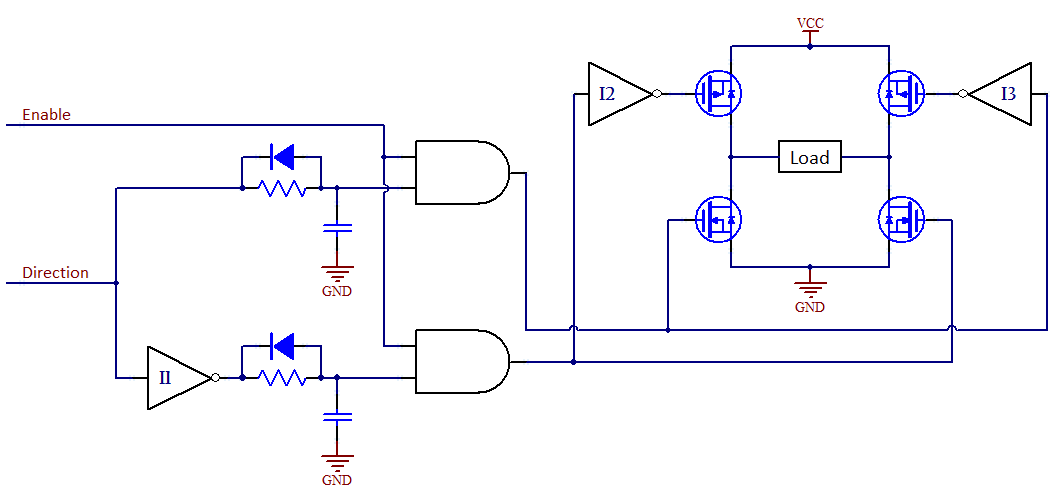
3. One PWM & Two Direction
회전 방향 제어를 위해 2개의 핀이 사용되고, 속도 제어를 위해 1개의 핀이 사용되는 방식입니다.
 |
| One PWM & Two Direction으로 제어되는 H-bridge |
L293이라는 Motor Driver IC가 이 방식을 사용합니다.
 |
| L293 Motor Driver IC |

이 경우 GenericMotor는 다음과 같이 설정합니다.

- pwm Pin: 속도 제어에 사용되는 PWM 핀 번호
- F dir Pin: 정회전 설정에 사용되는 핀 번호
- B dir Pin: 역회전 설정에 사용되는 핀 번호
H-bridge 제어 유형별로 Sketch Option 설정을 마쳤다면 다음과 같이 Wire Editor에서 연결하고 아두이노 스케치를 Export & Upload하면 유니티에서 회로를 테스트할 수 있습니다.


- punchValue: 모터에 걸린 부하로 인해 제어되지 않는 값의 구간을 없애준다.
- Value: 모터 제어 값 (범위 -1 ~ 1)
- +1: 정방향 최대 속도
- 0: 정지
- -1: 역방향 최대 속도
- Stop: Value를 0으로 만들어 줌
punchValue는 Value의 값이 모터를 회전시키기에 부족한 출력을 낼때 모터에서 소리가 나는 것을 방지해주는 값입니다. Value는 punchValue에 의해 아래와 같은 출력 곡선을 만들게 됩니다.

C# Script로 GenericMotor를 제어하는 방법은 다음과 같습니다.
(본 예제는 보드 연결 시 DC 모터를 최저 속도에서 최고 속도까지 정회전과 역회전을 반복합니다.)
using UnityEngine;
using System.Collections;
using Ardunity;
public class MyComponent : MonoBehaviour
{
public GenericMotor motor;
private bool _toggle = true;
private float _value;
void Start ()
{
_value = motor.Value;
}
void Update ()
{
if(motor.connected)
{
if(_toggle == true)
{
_value += 0.001f;
if(_value >= 1f)
{
_value = 1f;
_toggle = false;
}
}
else
{
_value -= 0.001f;
if(_value <= -1f)
{
_value = -1f;
_toggle = true;
}
}
motor.Value = _value;
}
}
}
받은 ardunity assets에 generic motor가 없는데 왜 이런거죠?
답글삭제Generic Motor는 ARDUnity Deluxe버전에 있습니다.
답글삭제